Unidad 4. Plataformas de software interactivas de tiempo real¶
Introducción¶
Hemos llegado al final del curso. En esta unidad aplicarás todos los conceptos que has aprendido para la construcción de aplicaciones interactivas que integren sistemas embebidos con plataformas de cómputo interactivas. En particular vamos a utilizar Unity.
Propósitos de aprendizaje¶
Integrar sensores y actuadores a plataformas de software para la construcción de aplicaciones interactivas de tiempo real.
Temas¶
- Integración de sistemas embebidos a plataformas de cómputo interactivas: hilos, colas, sincronización, protocolos.
- Repaso de conceptos de programación orientado a objetos: herencia, clases abstractas, manejo de memoria.
Ejercicios y lecturas¶
Sesión 1: introducción¶
Ejercicio 1: introducción al plugin Ardity¶
Para realizar la integración, vamos a utilizar un plugin para Unity llamada Ardity. Sin embargo, vamos a analizar este plugin completamente hasta entender cada una de sus partes.
La guía de trabajo se encuentra aquí
Ejercicio 2: evaluación formativa¶
Al final de la guía te dejo un MINI-RETO. Este consiste en estudiar a fondo el código fuente del plugin. Es un reto grande porque posiblemente tengas que recordar algunas de tus cursos anteriores de programación. El mini-reto requiere que repases y estudies algunas cosas nuevas también.
Una vez hagas el paso anterior:
- Crea un proyecto nuevo en Unity.
- Configura el soporte para el puerto serial tal como lo viste en la guía.
- OJO, no instales el paquete Ardity. SI YA LO HICISTE, vuelva a comenzar.
- Ahora toma únicamente LOS SCRIPTS de Ardity necesarios (SOLO LOS NECESARIOS) para hacer que la aplicación de la guía funcione de nuevo.
Trabajo autónomo 1: análisis¶
(Tiempo estimado: 6 horas 20 minutos)
Inicialmente te propongo que repases y/o termines los ejercicios anteriores.
Ahora, vamos a analizar más detalladamente una de las escenas demo de Ardity: DemoScene_UserPoll_ReadWrite
Primero, vamos a analizar rápidamente el código de arduino:
uint32_t last_time = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
// Print a heartbeat
if ( (millis() - last_time) > 2000)
{
Serial.println("Arduino is alive!!");
last_time = millis();
}
// Send some message when I receive an 'A' or a 'Z'.
switch (Serial.read())
{
case 'A':
Serial.println("That's the first letter of the abecedarium.");
break;
case 'Z':
Serial.println("That's the last letter of the abecedarium.");
break;
}
}
Consideraciones a tener presentes con este código:
- La velocidad de comunicación es de 9600. Esa misma velocidad se tendrá que configurar del lado de Unity para que ambas partes se puedan entender.
- Nota que no estamos usando la función delay(). Estamos usando millis para medir tiempos
relativos. Nota que cada dos segundos estamos enviando un mensaje indicando que el
arduino está activo:
Arduino is alive!! - Observa que el buffer del serial se lee constantemente. NO estamos usando el método available() que usualmente utilizamos. ¿Recuerdas lo anterior? Con available() nos aseguramos que el buffer de recepción tiene al menos un byte para leer; sin embargo, cuando usamos Serial.read() sin verificar antes que tengamos datos en el buffer, es muy posible que el método devuelva un -1 indicando que no había nada en el buffer de recepción. NO OLVIDES ESTO POR FAVOR.
- Por último nota que todos los mensajes enviados por arduino usan el método println. ¿Y esto por qué es importante? porque println enviará la información que le pasemos como argumento, codificada en ASCII, y adicionará al final 2 bytes: 0x0D y 0x0A. Estos bytes serán utilizados por Ardity para detectar que la cadena enviada por Arduino está completa. NO OLVIDES VERIFICAR LO ANTERIOR, si no logras identificarlo habla con el profe.
Ahora analicemos la parte de Unity/Ardity. Para ello, carguemos una de las escenas ejemplo: DemoScene_UserPoll_ReadWrite
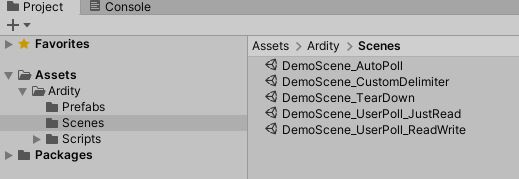
Nota que la escena tiene 3 gameObjects: Main Camera, SerialController y SampleUserPolling_ReadWrite.
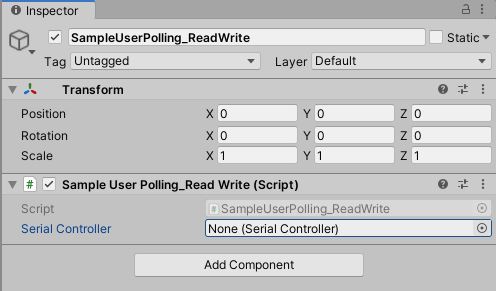
Veamos el gameObject SampleUserPolling_ReadWrite. Este gameObject tiene dos components, un transform y un script. El script tiene el código como tal de la aplicación del usuario.
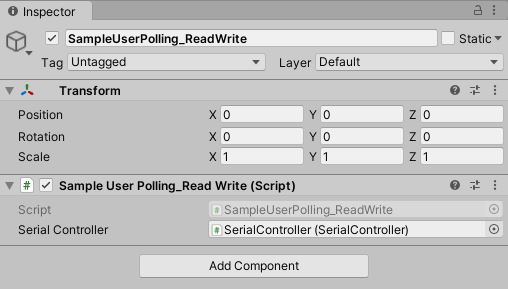
Nota que el script expone una variable pública: serialController. Esta variable es del tipo SerialController.
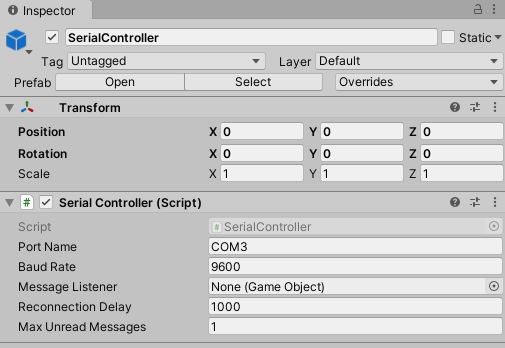
Esa variable nos permite almacenar la referencia a un objeto tipo SerialController. ¿Donde estaría ese objeto? Pues cuando el gameObject SerialController es creado nota que uno de sus componentes es un objeto de tipo SerialController:
Entonces desde el editor de Unity podemos arrastrar el gameObject SerialController al campo SerialController del gameObject SampleUserPolling_ReadWrite y cuando se despliegue la escena, automáticamente se inicializará la variable serialController con la referencia en memoria al objeto SerialController:

De esta manera logramos que el objeto SampleUserPolling_ReadWrite tenga acceso a la información del objeto SerialController.
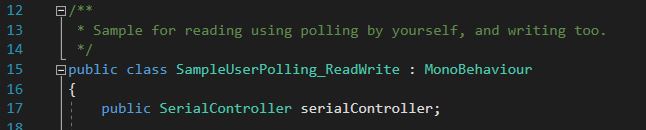
Observemos ahora qué datos y qué comportamientos tendría un objeto de tipo SampleUserPolling_ReadWrite:
/**
* Ardity (Serial Communication for Arduino + Unity)
* Author: Daniel Wilches <dwilches@gmail.com>
*
* This work is released under the Creative Commons Attributions license.
* https://creativecommons.org/licenses/by/2.0/
*/
using UnityEngine;
using System.Collections;
/**
* Sample for reading using polling by yourself, and writing too.
*/
public class SampleUserPolling_ReadWrite : MonoBehaviour
{
public SerialController serialController;
// Initialization
void Start()
{
serialController = GameObject.Find("SerialController").GetComponent<SerialController>();
Debug.Log("Press A or Z to execute some actions");
}
// Executed each frame
void Update()
{
//---------------------------------------------------------------------
// Send data
//---------------------------------------------------------------------
// If you press one of these keys send it to the serial device. A
// sample serial device that accepts this input is given in the README.
if (Input.GetKeyDown(KeyCode.A))
{
Debug.Log("Sending A");
serialController.SendSerialMessage("A");
}
if (Input.GetKeyDown(KeyCode.Z))
{
Debug.Log("Sending Z");
serialController.SendSerialMessage("Z");
}
//---------------------------------------------------------------------
// Receive data
//---------------------------------------------------------------------
string message = serialController.ReadSerialMessage();
if (message == null)
return;
// Check if the message is plain data or a connect/disconnect event.
if (ReferenceEquals(message, SerialController.SERIAL_DEVICE_CONNECTED))
Debug.Log("Connection established");
else if (ReferenceEquals(message, SerialController.SERIAL_DEVICE_DISCONNECTED))
Debug.Log("Connection attempt failed or disconnection detected");
else
Debug.Log("Message arrived: " + message);
}
}
Vamos a realizar una prueba. Pero antes configuremos el puerto serial en el cual está conectado el arduino. El arduino ya debe estar corriendo el código de muestra del sitio web del plugin.
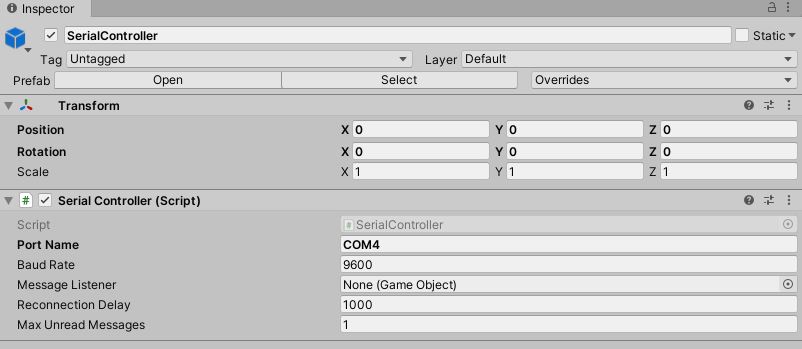
En este caso el puerto es COM4.
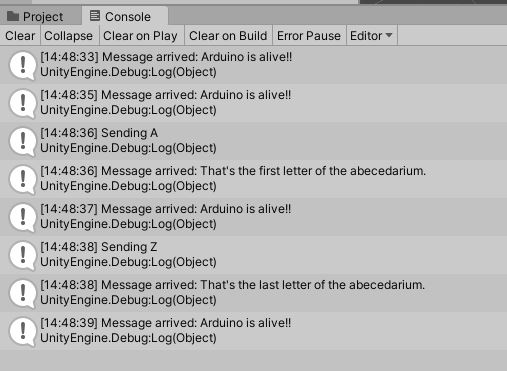
Corre el programa, abre la consola y selecciona la ventana Game del Editor de Unity. Con la ventana seleccionada (click izquierdo del mouse), escribe las letras A y Z. Notarás los mensajes que aparecen en la consola:
Una vez la aplicación funcione nota algo en el código de SampleUserPolling_ReadWrite:
serialController = GameObject.Find("SerialController").GetComponent<SerialController>();
Comenta esta línea y corre la aplicación de nuevo. Funciona?
Ahora, elimina el comentario de la línea y luego borra la referencia al SerialController en el editor de Unity:
Corre de nuevo la aplicación.
- ¿Qué puedes concluir?
- ¿Para qué incluyó esta línea el autor del plugin?
Ahora analicemos el código del método Update de SampleUserPolling_ReadWrite:
// Executed each frame
void Update()
{
.
.
.
serialController.SendSerialMessage("A");
.
.
.
string message = serialController.ReadSerialMessage();
.
.
.
}
¿Recuerdas cada cuánto se llama el método Update?
Update se llama en cada frame. Lo llama automáticamente el motor de Unity
Nota los dos métodos que se resaltan:
serialController.SendSerialMessage("A");
string message = serialController.ReadSerialMessage();
Ambos métodos se llaman sobre el objeto cuya dirección en memoria está guardada en la variable serialController.
El primer método permite enviar la letra A y el segundo permite recibir una cadena de caracteres.
- ¿Cada cuánto se envía la letra A o la Z?
- ¿Cada cuánto leemos si nos llegaron mensajes desde el arduino?
Ahora vamos a analizar cómo transita la letra A desde el SampleUserPolling_ReadWrite hasta el arduino.
Para enviar la letra usamos el método SendSerialMessage de la clase SerialController. Observa que la clase tiene dos variables protegidas importantes:
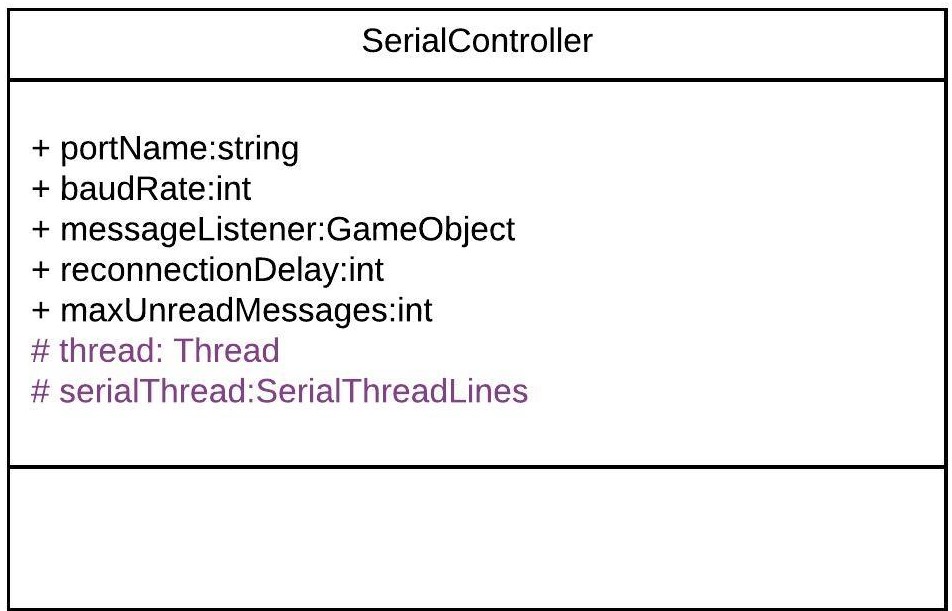
protected Thread thread;
protected SerialThreadLines serialThread;
Con esas variables vamos a administrar un nuevo hilo y vamos a almacenar una referencia a un objeto de tipo SerialThreadLines.
En el método onEnable de SerialController tenemos:
serialThread = new SerialThreadLines(portName, baudRate, reconnectionDelay, maxUnreadMessages);
thread = new Thread(new ThreadStart(serialThread.RunForever));
thread.Start();
Aquí vemos algo muy interesante, el código del nuevo hilo que estamos creando será RunForever y ese código actuará sobre los datos del objeto cuya referencia está almacenada en serialThread.
Vamos a concentrarnos ahora en serialThread que es un objeto de la clase SerialThreadLines:
public class SerialThreadLines : AbstractSerialThread
{
public SerialThreadLines(string portName,
int baudRate,
int delayBeforeReconnecting,
int maxUnreadMessages)
: base(portName, baudRate, delayBeforeReconnecting, maxUnreadMessages, true)
{
}
protected override void SendToWire(object message, SerialPort serialPort)
{
serialPort.WriteLine((string) message);
}
protected override object ReadFromWire(SerialPort serialPort)
{
return serialPort.ReadLine();
}
}
Al ver este código no se observa por ningún lado el método RunForever, que es el código que ejecutará nuestro hilo. ¿Dónde está? Observe que SerialThreadLines también es un AbstractSerialThread. Entonces es de esperar que el método RunForever esté en la clase AbstractSerialThread.
Por otro lado nota que para enviar la letra A usamos el método SendSerialMessage también sobre los datos del objeto reverenciado por serialThread del cual ya sabemos que es un SerialThreadLines y un AbstractSerialThread
public void SendSerialMessage(string message)
{
serialThread.SendMessage(message);
}
Al igual que RunForever, el método SendMessage también está definido en AbstractSerialThread.
Veamos entonces ahora qué hacemos con la letra A:
public void SendMessage(object message)
{
outputQueue.Enqueue(message);
}
Este código nos da la clave. Lo que estamos haciendo es guardar la letra A que queremos transmitir en una COLA. Esta estructura de datos permite PASAR información de un HILO a otro HILO.
¿Cuáles hilos?
Pues tenemos en este momento dos hilos: el hilo del motor y el nuevo hilo que creamos antes. El hilo que ejecutará el código RunForever sobre los datos del objeto de tipo SerialThreadLines:AbstractSerialThread. Por tanto, observa que la letra A la estamos guardando en la COLA del SerialThreadLines:AbstractSerialThread
Si observas con detenimiento el código de RunForever:
public void RunForever()
{
try
{
while (!IsStopRequested())
{
...
try
{
AttemptConnection();
while (!IsStopRequested())
RunOnce();
}
catch (Exception ioe)
{
...
}
}
}
catch (Exception e)
{
...
}
}
Los detalles están en RunOnce():
private void RunOnce()
{
try
{
// Send a message.
if (outputQueue.Count != 0)
{
SendToWire(outputQueue.Dequeue(), serialPort);
}
object inputMessage = ReadFromWire(serialPort);
if (inputMessage != null)
{
if (inputQueue.Count < maxUnreadMessages)
{
inputQueue.Enqueue(inputMessage);
}
}
}
catch (TimeoutException)
{
}
}
Y en este punto vemos finalmente qué es lo que pasa: para enviar la letra A, el código del hilo pregunta si hay mensajes en la cola. Si los hay, nota que el mensaje se saca de la cola y se envía:
SendToWire(outputQueue.Dequeue(), serialPort);
Si buscamos el método SendToWire en AbstractSerialThread vemos:
protected abstract void SendToWire(object message, SerialPort serialPort);
Y aquí es donde se conectan las clases SerialThreadLines con AbstractSerialThread, ya que el método SendToWire es abstracto, SerialThreadLines tendrá que implementarlo
public class SerialThreadLines : AbstractSerialThread
{
...
protected override void SendToWire(object message, SerialPort serialPort)
{
serialPort.WriteLine((string) message);
}
...
}
Aquí vemos finalmente el uso de la clase SerialPort de C# con el método WriteLine
Finalmente, para recibir datos desde el serial, ocurre el proceso contrario:
public class SerialThreadLines : AbstractSerialThread
{
...
protected override object ReadFromWire(SerialPort serialPort)
{
return serialPort.ReadLine();
}
}
ReadLine también es la clase SerialPort. Si leemos cómo funciona ReadLine queda completamente claro la razón de usar otro hilo:
Advertencia
Remarks Note that while this method does not return the NewLine value, the NewLine value is removed from the input buffer.
By default, the ReadLine method will block until a line is received. If this behavior is undesirable, set the ReadTimeout property to any non-zero value to force the ReadLine method to throw a TimeoutException if a line is not available on the port.
Por tanto, volviendo a RunOnce:
private void RunOnce()
{
try
{
if (outputQueue.Count != 0)
{
SendToWire(outputQueue.Dequeue(), serialPort);
}
object inputMessage = ReadFromWire(serialPort);
if (inputMessage != null)
{
if (inputQueue.Count < maxUnreadMessages)
{
inputQueue.Enqueue(inputMessage);
}
else
{
Debug.LogWarning("Queue is full. Dropping message: " + inputMessage);
}
}
}
catch (TimeoutException)
{
// This is normal, not everytime we have a report from the serial device
}
}
Vemos que se envía el mensaje:
SendToWire(outputQueue.Dequeue(), serialPort);
Y luego el hilo se bloquea esperando por una respuesta:
object inputMessage = ReadFromWire(serialPort);
Nota que primero se envía y luego el hilo se bloquea. NO SE DESBLOQUEARÁ HASTA que no envíe una respuesta desde Arduino o pasen 100 ms que es el tiempo que dura bloqueada la función antes de generar una excepción de timeout de lectura.
¿Cómo sabemos que son 100 ms?
Mira con detenimiento el código. La siguiente línea te dará una pista.
// Amount of milliseconds alloted to a single read or connect. An
// exception is thrown when such operations take more than this time
// to complete.
private const int readTimeout = 100;
Sesión 2: manejo de las excepciones¶
Ejercicio 3: excepciones¶
De nuevo vamos a visitar el demo: DemoScene_UserPoll_ReadWrite.
Resuelve las siguientes cuestiones:
- ¿Qué excepciones se están considerando en el código?
- ¿Qué pasa si no reciben datos por el puerto serial durante 100ms?
- ¿Qué pasa si el cable serial se desconecta de manera inesperada?
- ¿Cómo se reestablece el funcionamiento de la aplicación?
- ¿Qué modificación tendríamos que hacer a la aplicación de arduino para reestablecer la comunicación?
Ejercicio 4: ¿Cómo incluir soporte para nuevo protocolo¶
Describe detalladamente qué pasos debes realizar para soportar un nuevo protocolo de comunicaciones en Ardity.
Trabajo autónomo 2: reto¶
(Tiempo estimado: 6 horas 20 minutos)
De nuevo, repasa los ejercicios anteriores y realiza el reto.
RETO: integración con un protocolo binario¶
- Realiza una aplicación en Arduino que MEDIANTE un protocolo BINARIO envíe el valor de dos variables en punto flotante y una entera con signo 32 bits. TODAS LAS VARIABLES deben ir en el mismo paquete de DATOS.
- El paquete de datos solo será enviado por SOLICITUD explícita. La SOLICITUD
se realizará enviando el byte
7E. - Realiza una aplicación en Unity que solicite la variables a Arduino cada 100 ms.
- Construye una interfaz de usuario en Unity para visualizar las variables. RECUERDA: una interfaz de usuario, no la consola de Unity.
Evaluación de la Unidad 4¶
Enunciado¶
Vas a realizar este reto en equipo, máximo de 3 personas. Debes construir una aplicación interactiva usando Unity que cumpla con las siguientes restricciones:
Usarás solo aquellas partes de Ardity que sean necesarias como te solicitaré más adelante.
Implementa una escena en Unity que tenga al menos los siguientes GameObjects: Un SerialControllerASCII y un SerialControllerBinario. Ambos GameObjects permitirán atender a dos controladores externos que se conectarán al computador por medio de dos puertos seriales diferentes. Uno de los controladores implementará un protocolo ASCII y el un protocolo binario.
Ambos controladores tendrán un sensor digital y un actuador digital. Podrías usar, si gustas, un pulsador y un LED.
Construye una interfaz de usuario con los elementos mínimos que se muestran en la siguiente figura:

La aplicación debe detectar automáticamente los puertos seriales disponibles y el usuario solo tendrá que seleccionar el deseado.
La interfaz debe tener un botón que permita seleccionar un modo de lectura de entradas manual y otro automático. En el manual, las entradas digitales se leen usando los botones
Read. En el modo automático, la propia aplicación interactiva realiza las lecturas.Los protocolos ASCII y Binario los debes proponer tu mismo en base a los que aprendiste en las unidades anteriores del curso.
En cuanto a la arquitectura de software debes:
- Implementar controladores para cada tipo de protocolo similares a
SerialController.csySerialControllerCustomDelimiter.cs. - Crear una clase que herede de la clase abstracta
AbstractSerialThread.cspara cada protocolo implementado.
- Implementar controladores para cada tipo de protocolo similares a
Elimina del proyecto todos los archivos de Ardity que no sean necesarios.
¿Qué debes entregar?¶
Diligencia y entrega en este enlace.
Te pediré que subas a Github el código del proyecto en Unity y el de los controladores.
También tendrás que compartir la URL de un video en youtube donde demuestres funcionando la aplicación.
Consideraciones para el video:
- El video DEBE TENER una duración
MÁXIMAde 15 minutos. - El video debe tener los siguientes capítulos en este mismo orden:
- Demostración de la solución: muestra al mismo tiempo la interfaz de usuario y los controladores para que se pueda ver la interacción con las entradas y salidas digitales.
- Explicación de los protocolos de comunicación: te recomiendo usar draw.io.
- Explicación del proyecto en Unity: estructura de clases e implementación.
- Explicación del código de los controladores
Criterios de evaluación¶
- Funcionamiento Protocolo ASCII: 0.25
- Funcionamiento Protocolo Binario: 0.25
- Selección de puerto serial y velocidad: 0.25
- Visualización de tramas enviadas y recibidas: 0.25
- Lectura de entradas en modo manual: 0.25
- Lectura de entradas en modo automático: 0.5
- Escritura de salidas: 0.25
- Explicación del protocolo ASCII: 0.5
- Explicación del protocolo BINARIO: 0.5
- Explicación del Código en Unity y estructura del proyecto: 1
- Explicación del código de los controladores: 1
- No cumplir con las consideraciones para el video: -0.5
- No subir el proyecto a Github: -1
- La aplicación tiene bugs o funciona de manera inestable algunas veces: -0.5