Unidad 1. Software para sistemas embebido¶
Introducción¶
En esta unidad vamos a aprender técnicas para programar los sistemas embebidos que permitirán capturar y/o generar información desde y hacia el mundo exterior de la aplicación interactiva.
Propósito de aprendizaje¶
Analizar la plataforma de hardware y software del controlador que se empleará como interfaz entre los sensores-actuadores y las plataformas de software interactivas a utilizar en el curso.
Construir aplicaciones simples para el controlador con el fin de explorar algunas posibilidades y características de su plataforma de software.
Modelar el software del controlador, mediante el uso de máquinas de estado, para poder establecer escenarios que permitan documentar y verificar su funcionamiento.
Implementar el software del controlador mediante las técnicas de programación adecuadas que permitan sacarle el máximo provecho a dicho controlador.
Verificar el software del controlador por medio de la comparación de resultados de funcionamiento con los posibles escenarios o vectores de prueba definidos en el modelado.
Temas¶
- Herramientas del framework de arduino: toolchain, bootloader.
- Código fuente del framework de arduino: estructura y modificaciones simples.
- Introducción a la programación NO BLOQUEANTE.
- Técnicas de programación: encapsulamiento mediante tareas, programación concurrente.
- Framework de arduino: uso de clases en C++ en un ambiente de programación para sistemas embebidos.
- Introducción a los punteros.
- Modelamiento y programación utilizando máquinas de estado.
- Manejo del puerto serial, medidas de tiempo y retardos utilizando técnicas de programación no bloqueantes.
Lecturas, ejercicios y proyecto¶
Ejercicio 1: introducción y ambiente de trabajo¶
Vamos a revisar entre todos este material introductorio.
El material anterior cubre los pasos necesarios para instalar y configurar el entorno de desarrollo de software bajo el framework de arduino. En este escenario se utilizan los lenguajes C y C++.
Ejercicio 2: flujo de trabajo¶
El flujo de trabajo para realizar aplicaciones con arduino será:
- Crear un archivo nuevo. Este archivo inicia con dos funciones:
setup()yloop(). - La función setup se ejecuta solo una vez al momentos de energizar el ESP32 o cuando se presiona el botón de reset.
- La función loop será llamada constantemente por el framework de arduino.
- Una vez escrita la parte de la aplicación que se desea probar, se debe compilar. El proceso de compilación verifica que el programa no tenga errores sintácticos y genera el código de máquina que posteriormente se cargará en la memoria de programa del ESP32. Para realizar la verificación y compilación se selecciona el primer ícono en la parte superior izquierda.
- Una vez compilada la aplicación se procede a grabar la memoria del microcontrolador. Esto se realiza con el segundo ícono de la parte superior izquierda.
- Finalmente se selecciona el ícono del monitor serial en la esquina superior derecha. Este ícono permite abrir la terminal
serial por medio la cual se podrán visualizar los mensajes que el ESP32 le enviará al computador utilizando el
objeto
Serial.
Vamos a probar todos los pasos anteriores con este programa:
void setup() {
Serial.begin(115200);
}
void loop() {
Serial.print("Hello from ESP32\n");
delay(1000);
}
Ejercicio 3: hardware de prueba¶
Inicialmente vas a simular todo los dispositivos de hardware tanto el microcontrolador como los periféricos que le conectarás a este. Harás mientras te tomas confianza y tienes tiempo de ir consiguiendo algunas partes para el curso.
Este ejercicio lo realizaremos juntos. Consiste en explorar la plataforma de simulación tinkercad.
Ejercicio 4: API de arduino¶
En este enlace se pueden consultar muchas de las funciones disponibles para realizar programas usando el API de Arduino.
El siguiente programa permite encender y apagar un LED conectado a un puerto de entrada salida:
void setup()
{
pinMode(2, OUTPUT);
}
void loop()
{
digitalWrite(2, HIGH);
delay(1000); // Wait for 1000 millisecond(s)
digitalWrite(2, LOW);
delay(1000); // Wait for 1000 millisecond(s)
}
El siguiente programa permite leer un puerto digital y encender y apagar un LED:
void setup()
{
pinMode(2, OUTPUT);
pinMode(3,INPUT);
}
void loop()
{
if(digitalRead(3) == HIGH){
digitalWrite(2, HIGH);
}
else{
digitalWrite(2, LOW);
}
}
Ejercicio 5: RETO¶
Realiza un programa que lea el estado de dos switches y encienda solo uno de 4 LEDs (un LED para cada combinación posible de los suiches).
No olvides realizar el montaje en tinkercad.
Ejercicio 6: puerto serial¶
En el siguiente ejercicio vas a explorar, de manera básica el puerto serial del microcontrolador. Lee el programa, entiéndelo, realiza el montaje de hardware necesario y verifica su funcionamiento. Tinkercad te permite también simular el puerto serial.
void setup()
{
pinMode(2, OUTPUT);
pinMode(3,INPUT);
Serial.begin(115200);
}
void loop()
{
if(digitalRead(3) == HIGH){
digitalWrite(2, HIGH);
Serial.println("LED ON");
}
else{
digitalWrite(2, LOW);
Serial.println("LED OFF");
}
}
Ejercicio 7: RETO¶
Modifique el código del reto anterior para indicar por el puerto serial cuál de los 4 LEDs está encendido.
Ejercicio 8: Convertidor análogo a digital¶
El siguiente programa lee una señal análoga y la convierte a digital.
void setup()
{
pinMode(2, OUTPUT);
pinMode(3,INPUT);
Serial.begin(115200);
}
void loop()
{
Serial.println(analogRead(A0));
delay(1000);
}
Realiza un montaje en tinkercad que te permita simular la señal analógica. Puedes usar un potenciómetro.
Ejercicio 9: RETO¶
Realiza el montaje en tinkercad y un programa para el microcontrolador que lea el valor de una entrada analógica. Si la entrada es menor a 340 enciende un led verde y envía por el puerto serial solo una vez LED_VERDE. Si es mayor a 340 pero menor a 700 enciende solo el LED amarillo y envía por el puerto serial solo una vez LED_AMARILLO. Finalmente, si es mayor a 700 enciende solo el LED rojo y envía por el puerto serial solo una vez LED_ROJO. Ten en cuenta que al entrar a cada rango se debe enviar solo una vez el mensaje por el puerto serial.
Ejercicio 10: salidas analógicas¶
Hasta ahora hemos explorado varias maneras de interactuar con dispositivos externos por medio de puertos de entrada salida usando:
- Salidas digitales
- Entradas digitales
- Entradas analógicas
Ahora en este ejercicio vamos a explorar las salida analógicas. Dichas salidas, en principio son digitales pero moduladas en ancho de pulso o de PWM. Para ello usamos esta función:
analogWrite(pin, value)
analogWrite produce una señal cuadra con un duty cycle dado por value,
como se muestra en la figura de este
sitio.
Analiza el siguiente ejemplo:
#define ledPin 3
#define analogPin 0
uint16_t counter = 0;
int8_t direction = 1;
void setup() {
Serial.begin(115200);
pinMode(ledPin, OUTPUT);
}
void loop() {
analogWrite(ledPin, counter);
counter = (counter + direction);
if(counter == 0) direction = 1;
if(counter == 129) direction = -1;
Serial.println(counter);
delay(20);
}
Ejercicio 11: RETO¶
Monta un circuito (en tinkercad) o tanto mejor si tienes hardware real y realiza un programa que permita controlar el brillo de un LED mediante un potenciómetro.
Ten en presente que el valor del potenciómetro va de 0 hasta 5V, en tinkercad, o 0 a 3.3V si tienes hardware real, y este se convierte a un valor entre 0 y 1023, es decir, la conversión se realiza en 10 bits.
Considera que el valor del PWM puede ir de 0 a 255. Para garantizar que
value estará en ese rango podemos emplear una de las funciones matemáticas
que ofrece el API de arduino:
map(value, fromLow, fromHigh, toLow, toHigh)
En este caso map toma fromLow y lo convierte a toLow y
fromHigh y lo convierte a toHigh. Los valores intermedios son mapeados de
manera lineal.
NOTA: para el ESP32 se debe usar una función diferente para el PWM. Ver este enlace.
Ejercicio 12: variables static¶
Vamos a explorar un poco más el lenguaje de programación.
Analiza el siguiente código:
void setup() {
Serial.begin(115200);
}
void loop() {
uint8_t counter = 20;
counter++;
Serial.println(counter);
delay(100);
}
Compara el código anterior con este:
void setup() {
Serial.begin(115200);
}
void loop() {
static uint8_t counter = 20;
counter++;
Serial.println(counter);
delay(100);
}
Ahora compara con este otro código:
uint8_t counter = 5;
void setup() {
Serial.begin(115200);
}
void incCounter() {
static uint8_t counter = 10;
counter++;
Serial.print("Counter in incCounter: ");
Serial.println(counter);
}
void loop() {
static uint8_t counter = 20;
counter++;
Serial.print("Counter in loop: ");
Serial.println(counter);
incCounter();
Serial.print("Counter outside loop: ");
Serial.println(::counter);
::counter++;
delay(500);
}
¿Qué puedes concluir?
Ejercicio 13: introducción al código no bloqueante¶
Analiza el siguiente ejemplo:
const uint8_t ledPin = 3;
uint8_t ledState = LOW;
uint32_t previousMillis = 0;
const uint32_t interval = 1000;
void setup() {
// set the digital pin as output:
pinMode(ledPin, OUTPUT);
}
void loop() {
uint32_t currentMillis = millis();
if (currentMillis - previousMillis >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
}
¿Qué hace este programa?
Ejercicio 14: RETO¶
Realice un programa que encienda y apague tres LEDs a 1 Hz, 5 Hz y 7 Hz respectivamente utilizando la técnica vista en el ejercicio anterior.
Ejercicio 15: arreglos¶
Vamos a analizar uno de los ejemplos que vienen con el SDK de arduino. Este ejemplo nos permite ver cómo podemos hacer uso de los arreglos para manipular varios LEDs:
int timer = 100; // The higher the number, the slower the timing.
int ledPins[] = {
2, 7, 4, 6, 5, 3
}; // an array of pin numbers to which LEDs are attached
int pinCount = 6; // the number of pins (i.e. the length of the array)
void setup() {
// the array elements are numbered from 0 to (pinCount - 1).
// use a for loop to initialize each pin as an output:
for (int thisPin = 0; thisPin < pinCount; thisPin++) {
pinMode(ledPins[thisPin], OUTPUT);
}
}
void loop() {
// loop from the lowest pin to the highest:
for (int thisPin = 0; thisPin < pinCount; thisPin++) {
// turn the pin on:
digitalWrite(ledPins[thisPin], HIGH);
delay(timer);
// turn the pin off:
digitalWrite(ledPins[thisPin], LOW);
}
// loop from the highest pin to the lowest:
for (int thisPin = pinCount - 1; thisPin >= 0; thisPin--) {
// turn the pin on:
digitalWrite(ledPins[thisPin], HIGH);
delay(timer);
// turn the pin off:
digitalWrite(ledPins[thisPin], LOW);
}
}
Ejercicio 16: encapsulamiento en tareas¶
El siguiente código muestra cómo podemos encapsular completamente el código del RETO anterior en tareas.
void setup() {
task1();
task2();
}
void task1(){
static uint32_t previousMillis = 0;
static const uint32_t interval = 1250;
static bool taskInit = false;
static const uint8_t ledPin = 3;
static uint8_t ledState = LOW;
if(taskInit == false){
pinMode(ledPin, OUTPUT);
taskInit = true;
}
uint32_t currentMillis = millis();
if ( (currentMillis - previousMillis) >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState);
}
}
void task2(){
static uint32_t previousMillis = 0;
static const uint32_t interval = 370;
static bool taskInit = false;
static const uint8_t ledPin = 5;
static uint8_t ledState = LOW;
if(taskInit == false){
pinMode(ledPin, OUTPUT);
taskInit = true;
}
uint32_t currentMillis = millis();
if ( (currentMillis - previousMillis) >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState);
}
}
void loop() {
task1();
task2();
}
Una de las ventajas del código anterior es que favorece el trabajo en equipo. Nota que se puede entregar a cada persona del equipo una tarea. Finalmente, uno de los miembros del equipo podrá integrar todas las tareas así:
void task1(){
.
.
.
}
void task2(){
.
.
.
}
void task3(){
.
.
.
}
void setup() {
task1();
task2();
task3();
}
void loop() {
task1();
task2();
task3();
}
Ejercicio 17: introducción a las clases¶
Observa detenidamente el código de ambas tareas. Verás que es muy similar. En este ejercicio veremos una construcción interesante de C++ que favorece el reuso de código. Nota que el código de las tareas 1 y 2 es prácticamente el mismo, solo que está actuando sobre diferentes datos.
¿Cómo así?
Analicemos por partes. Primero, la inicialización de la tarea:
Para la tarea 1 (task1):
if(taskInit == false){
pinMode(ledPin, OUTPUT);
taskInit = true;
}
Para la tarea 2 (task2):
if(taskInit == false){
pinMode(ledPin, OUTPUT);
taskInit = true;
}
En el código anterior cada tarea tiene una variable que permite activar el código solo un vez, es decir, cuando taskInit es false. Esto se hace así para poder inicializar el puerto de salida donde estará el led conectado. Recuerde que esto se haga solo una vez. ¿Cuándo ocurrirá? Cuando llamemos taskX() (X es 1 o 2) en la función setup().
Segundo, el código que se llamará repetidamente en la función loop:
Para la tarea 1:
if ( (currentMillis - previousMillis) >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState);
}
Para la tarea 2:
uint32_t currentMillis = millis();
if ( (currentMillis - previousMillis) >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState);
}
Nota que los datos sobre los que actúa cada código, aunque tienen el mismo nombre son datos distintos:
Para la tarea 1:
static uint32_t previousMillis = 0;
static const uint32_t interval = 1250;
static bool taskInit = false;
static const uint8_t ledPin = 3;
static uint8_t ledState = LOW;
Para la tarea 2:
static uint32_t previousMillis = 0;
static const uint32_t interval = 370;
static bool taskInit = false;
static const uint8_t ledPin = 5;
static uint8_t ledState = LOW;
Pero ¿Por qué son distintos? porque estamos declarando las variables como estáticas dentro de cada tarea. Esto implica que las variables son privadas a cada función pero viven en memoria como si se tratara de variables globales.
Esto introduce la siguiente pregunta: ¿Qué tal si pudiéramos tener el mismo código, pero cada vez que lo llamemos indicarle sobre que datos debe actuar? Pues lo anterior es posible en C++ usando una construcción conocida como clase.
La clase nos permite definir un nuevo tipo dato y los algoritmos que se pueden aplicar a ese nuevo tipo de dato. En este caso, necesitamos que cada tarea pueda tener sus propias variables para previousMillis, interval, ledPin, ledState.
class LED{
private:
uint32_t previousMillis;
const uint32_t interval;
const uint8_t ledPin;
uint8_t ledState = LOW;
};
De esta manera en cada tarea podremos crear un nuevo LED así:
void task1(){
static LED led;
}
void task2(){
static LED led;
}
A cada nuevo LED se le conoce como un objeto. led es la variable por medio de las cuales podremos acceder a cada uno de los objetos creados en task1 y task2.
Notas:
- Cada objeto es independiente, es decir, cada objeto tiene su propia copia de cada variable definida en la clase. ¿Cuál es el contenido de cada objetos? el contenido es un uint32_t, un const uint32_t, un const uint8_t y uint8_t a los cuales les hemos dado nombres: previousMillis, interval, ledPin y ledState respectivamente.
- Las variables led definidas en task1 y task2 NO SON OBJETOS, son variables de tipo LED que permiten acceder al contenido de cada objeto.
- led es una variable propia de cada tarea.
- Nota que las variables definidas en LED son privadas (private). Esto quiere decir que no vamos a acceder a ellas directamente. Ya veremos más abajo cómo modificar sus valores.
Nuestro nuevo tipo LED tiene un problema y es que no permite definir para cada LED creado el intervalo y el puerto donde se conectará. Para resolver lo anterior se introduce el concepto de constructor de la clase. El constructor, permite definir los valores iniciales de cada objeto.
class LED{
private:
uint32_t previousMillis;
const uint32_t interval;
const uint8_t ledPin;
uint8_t ledState = LOW;
public:
LED(uint8_t _ledpin, uint32_t _interval): ledPin(_ledpin), interval(_interval) {
pinMode(_ledpin, OUTPUT);
previousMillis = 0;
}
};
El constructor de la clase es un método que recibe los valores iniciales del objeto y no devuelve nada.
Ahora si podemos definir cada objeto:
void task1(){
static LED led(3,725);
}
void task2(){
static LED led(5, 1360);
class LED{
private:
uint32_t previousMillis;
const uint32_t interval;
const uint8_t ledPin;
uint8_t ledState = LOW;
public:
LED(uint8_t _ledpin, uint32_t _interval): ledPin(_ledpin), interval(_interval) {
pinMode(_ledpin, OUTPUT);
previousMillis = 0;
}
void toggleLED(){
uint32_t currentMillis = millis();
if ( (currentMillis - previousMillis) >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState);
}
}
};
Finalmente, al llamar toggleLED debemos indicar sobre qué objeto deberá actuar:
void task1(){
static LED led(3,725);
led.toggleLED();
}
void task2(){
static LED led(5, 1360);
led.toggleLED();
}
La versión final del código será:
class LED{
private:
uint32_t previousMillis;
const uint32_t interval;
const uint8_t ledPin;
uint8_t ledState;
public:
LED(uint8_t _ledpin, uint32_t _interval): ledPin(_ledpin), interval(_interval) {
pinMode(_ledpin, OUTPUT);
previousMillis = 0;
ledState = LOW;
}
void toggleLED(){
uint32_t currentMillis = millis();
if ( (currentMillis - previousMillis) >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState);
}
}
};
void task1(){
static LED led(3,1250);
led.toggleLED();
}
void task2(){
static LED led(5,375);
led.toggleLED();
}
void setup() {
task1();
task2();
}
void loop() {
task1();
task2();
}
Ejercicio 18: de nuevo arreglos¶
Podemos llevar un paso más allá el ejercicio anterior si añadimos el concepto de arreglo. ¿Para qué? Observa que el código de task1 y task2 es muy similar. Tal vez podamos resolver el problema usando únicamente una tarea:
class LED{
private:
uint32_t previousMillis;
const uint32_t interval;
const uint8_t ledPin;
uint8_t ledState = LOW;
public:
LED(uint8_t _ledpin, uint32_t _interval): ledPin(_ledpin), interval(_interval) {
pinMode(_ledpin, OUTPUT);
previousMillis = 0;
}
void toggleLED(){
uint32_t currentMillis = millis();
if ( (currentMillis - previousMillis) >= interval) {
previousMillis = currentMillis;
if (ledState == LOW) {
ledState = HIGH;
} else {
ledState = LOW;
}
digitalWrite(ledPin, ledState);
}
}
};
void setup() {
task();
}
void task(){
static LED leds[2] = {{3,725},{5,1300}};
for(int i= 0; i < 2; i++){
leds[i].toggleLED();
}
}
void loop() {
task();
}
Ejercicio 19: punteros¶
Ahora vamos a explorar un concepto fundamental en C y C++: los punteros.
¿Qué son los punteros? para entenderlos vamos a dar un salto mortal en complejidad analizando este ejemplo:
void setup(){
Serial.begin(115200);
}
void processData(uint8_t *pData, uint8_t size, uint8_t *res){
uint8_t sum = 0;
for(int i= 0; i< size; i++){
sum = sum + *(pData+i) - 0x30;
}
*res = sum;
}
void loop(void){
static uint8_t rxData[10];
static uint8_t dataCounter = 0;
if(Serial.available() > 0){
rxData[dataCounter] = Serial.read();
dataCounter++;
if(dataCounter == 5){
uint8_t result = 0;
processData(rxData, dataCounter, &result);
dataCounter = 0;
Serial.println(result);
}
}
}
Ejercicio 20: comunicaciones seriales¶
Observa este video corto que introducirá como funcionan las comunicaciones seriales entre un sistema embebidos y una plataforma de cómputo interactiva.
Ejercicio 21: un poco más sobre el serial¶
Ahora lee el material de este sitio y responde las siguientes preguntas:
- ¿Cuál es la diferencia entre una interfaz de comunicación paralela y una serial?
- ¿Cuál es la diferencia entre un protocolo serial sincrónico y asincrónico?
- En el caso de arduino ¿Qué tipo de protocolo usamos?
- Si el protocolo serial asíncrono que usaremos es de 8 bits, un bit de arranque, un bit de parada, sin bit de paridad y a 9600 bps dibuja los diagramas de tiempo cuando se transmite el byte 0x01 y el carácter “1”
- ¿Es lo mismo transmitir el byte 0x01 que el byte “1”?
Ejercicio 22: api serial de arduino¶
¿Dónde encuentro el API de arduino para el manejo del serial?
Las siguientes preguntas las responderemos en los próximos ejercicios, pero por ahora lee algunas de las funciones del API del serial y responde:
- ¿Cual es la diferencia entre print y println?
- ¿Cuál es la diferencia entre print y write?
- ¿Qué pasa si utilizas read() cuando available() te devuelva cero?
- ¿Cuál es la diferencia entre readBytes? y readBytesUntil()?
- ¿Qué pasa si quieres leer 10 bytes con readBytes pero solo se han recibido 3?
Ejercicio 23: análisis del api serial (investigación: hipótesis-pruebas)¶
Qué crees que ocurre cuando:
- ¿Qué pasa cuando hago un Serial.available()?
- ¿Qué pasa cuando hago un Serial.read()?
- ¿Qué pasa cuando hago un Serial.read() y no hay nada en el buffer de recepción?
- Un patrón común al trabajar con el puerto serial es este:
if(Serial.available() > 0){
int dataRx = Serial.read()
}
- ¿Cuántos datos lee Serial.read()?
- ¿Y si quiero leer más de un dato? No olvides que no se pueden leer más datos de los disponibles en el buffer de recepción, claramente porque no hay más datos que los que tenga allí.
Ejercicio 24: buffer de recepción¶
Vamos a leer 3 datos del puerto serial:
if(Serial.available() >= 3){
int dataRx1 = Serial.read()
int dataRx2 = Serial.read()
int dataRx3 = Serial.read()
}
Vas a comparar el programa anterior con el que sigue:
Ejercicio 25: análisis, hipótesis, pruebas¶
¿Qué escenarios podría tener en este caso?
if(Serial.available() >= 2){
int dataRx1 = Serial.read()
int dataRx2 = Serial.read()
int dataRx3 = Serial.read()
}
Compara el este ejercicio con el anterior. Realiza pruebas, experimenta. ¿Qué puedes concluir? discute tus resultados con el profesor.
Ejercicio 26: miniRETO¶
Piense cómo podrías hacer lo siguiente:
void taskSerial(){
// Esta tarea tiene su propio buffer de recepción,
// es decir, su propio vector. Nadie más tiene acceso
}
void loop(){
taskSerial();
}
- Almacenar los datos en su propio buffer de recepción (el buffer será un arreglo).
- El buffer debe estar encapsulado en la tarea
- Los datos almacenados en el buffer no se pueden perder entre llamados a taskSerial(). La función taskSerial() se llama en la función loop.
- ¿Qué debes hacer para saber, en cualquier parte del código de taskSerial(), cuántos datos tienes guardados en el buffer de recepción?
Ejercicio 27: terminal serial¶
Vamos a detenernos un momento en el software del lado del computador: el terminal. Veamos dos de ellas, la terminal de arduino y esta otra (scriptcommunicator)
- ¿Qué es un programa terminal?
- ¿Para qué sirve?
Discute tus resultados con el profesor y tus compañeros.
Ejercicio 28: enviar datos por el puerto serial¶
Considera el siguiente programa
void setup()
{
Serial.begin(9600);
}
void loop()
{
if(Serial.available() > 0){
Serial.read();
int8_t var = -1;
Serial.println("Inicio de la prueba");
Serial.write(var);
Serial.print("\n");
Serial.print(var);
Serial.print('\n');
Serial.println("Fin de la prueba");
}
}
Ejecuta el programa
¿Qué observas en la terminal de arduino justo en estas dos líneas?
Serial.write(var);
Serial.print(var);
¿Qué observas en Scriptcommunicator para las dos líneas anteriores?
En la siguiente parte del código:
if(Serial.available() > 0){
Serial.read();
Comenta la línea Serial.read() en esta parte del código:
if(Serial.available() > 0){
//Serial.read();
¿Qué ocurre? ¿Por qué ocurre esto?
En la siguiente parte del código:
Serial.println("Inicio de la prueba");
Serial.write(var);
Serial.print("\n");
Serial.print(var);
Serial.print('\n');
Serial.println("Fin de la prueba");
¿Cuál es la diferencia entre estas dos líneas de código?
Serial.print("\n");
Serial.print('\n');
Ejercicio 29: miniRETO¶
Considera el siguiente código para analizar en Scriptcommunicator:
void setup()
{
Serial.begin(9600);
}
void loop()
{
if(Serial.available() > 0){
Serial.read();
int8_t var = 255;
int8_t var2 = 0xFF;
Serial.write(var);
Serial.print(var);
Serial.write(var2);
Serial.print(var2);
}
}
Explica qué está ocurriendo en cada caso.
Ejercicio 30: máquinas de estado¶
Una aplicación interactiva posee un sensor que produce ruido eléctrico al cambiar de estado. La siguiente figura, capturada con un osciloscopio muestra la señal del sensor.
En la figura se observa el ruido generado en la transición de la señal al pasar del estado alto al estado bajo; sin embargo, el mismo fenómeno ocurre al cambiar del estado bajo al alto. Nota que además pueden ocurrir falsos positivos en la señal, que se manifiestan como pulsos de muy corta duración. Un ingeniero electrónica experto nos indica que podemos considerar un cambio de estado en el sensor siempre que la señal esté estable por lo menos durante 100 ms, es decir, sin ruido y sin falsos positivos. Se debe realizar una aplicación que filtre el comportamiento ruidoso del sensor y reporte por un puerto serial únicamente los valores estables de la señal.
Para este ejercicio debes:
- Realizar un diagrama con el modelo en máquinas de estado para la aplicación
- Definir escenarios de prueba usando diagramas de secuencias.
- Implementar el modelo.
- Verificar los escenarios definidos
Ejercicio 31: miniRETO¶
En un escape room se requiere construir una aplicación para controlar una bomba temporizada. La siguiente figura ilustra la interfaz de la bomba. El circuito de control de la bomba está compuesto por tres sensores digitales, en este caso pulsadores, denominados UP, DOWN, ARM (los simularemos con el PC), un display (LCD) y una salida digital para activar la bomba (simularemos la salida y el display con el PC).
Nota
NO ES NECESARIO SIMULAR EL HARDWARE
Te propongo que hagas simulaciones del hardware por costos, pero si quieres realizar el montaje real sería GENIAL! Habla con el profesor para que te recomiende qué materiales puedes usar.
El controlador funciona así:
- Inicia en modo de configuración, es decir, no cuenta aún, la bomba está
desarmada. El valor inicial del conteo regresivo es de 20 segundos. - En el modo de configuración, los pulsadores UP y DOWN permiten aumentar o disminuir el tiempo inicial de la bomba.
- El tiempo se puede programar entre 10 y 60 segundos con cambios de 1 segundo.
- El tiempo de configuración se debe visualizar en el LCD (enviamos el valor al PC).
- El pulsador ARM arma la bomba.
- Una vez armada la bomba, comienza la cuenta regresiva que será visualizada en el LCD en por medio de una cuenta regresiva en segundos.
- La bomba explotará (se activa la salida de activación de la bomba) cuando el tiempo llegue a cero. En este punto el control regresará al modo de configuración.
- Una vez la bomba esté armada es posible desactivarla ingresando un código de seguridad. El código será la siguiente secuencia de pulsadores presionados uno después de otro: UP, DOWN, DOWN, UP, UP, ARM.
- Si la secuencia se ingresa correctamente el controlador pasará de nuevo al modo de configuración de lo contrario continuará la fatal cuenta regresiva.
Para este ejercicio debes:
- Realizar un diagrama con el modelo en máquinas de estado para la aplicación
- Definir escenarios de prueba usando diagramas de secuencias.
- Implementar el modelo.
- Verificar los escenarios definidos
PROYECTO EVALUATIVO¶
Solución al ejercicio 30¶
Antes de comenzar a realizar la evaluación te recomiendo que revises una posible solución a uno de los ejercicios anteriores.
Solución al ejercicio 30:
Te muestro un posible montaje en el protoboard para solucionar el ejercicio 30. Para este montaje elegí como puerto de entrada el número 19. Tu debes seleccionar el puerto que más te convenga en un tu microcontrolador.
Mira un posible diagrama de estados y un video corto donde te explico el diagrama:
Definición de los escenarios de prueba:
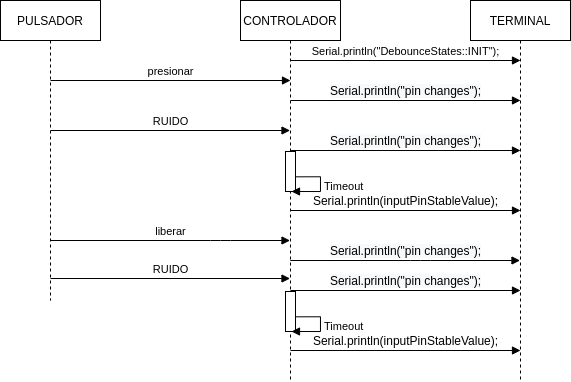
El código de la solución será este:
void setup() {
Serial.begin(115200);
}
void task() {
enum class DebounceStates {INIT, WAITING_CHANGE, WAITING_STABLE};
static DebounceStates debounceState = DebounceStates::INIT;
static uint8_t inputPinStableValue;
static uint32_t referenceTime;
const uint8_t INPUTPIN = 19;
const uint32_t STABLETIMEOUT = 100;
switch (debounceState) {
case DebounceStates::INIT: {
pinMode(INPUTPIN, INPUT_PULLUP);
inputPinStableValue = digitalRead(INPUTPIN);
debounceState = DebounceStates::WAITING_CHANGE;
Serial.println("DebounceStates::INIT");
break;
}
case DebounceStates::WAITING_CHANGE: {
if (digitalRead(INPUTPIN) != inputPinStableValue) {
referenceTime = millis();
debounceState = DebounceStates::WAITING_STABLE;
Serial.println("pin changes");
}
break;
}
case DebounceStates::WAITING_STABLE: {
uint8_t pinState = digitalRead(INPUTPIN);
if ( pinState == inputPinStableValue) {
debounceState = DebounceStates::WAITING_CHANGE;
}
else if ( (millis() - referenceTime) >= STABLETIMEOUT) {
inputPinStableValue = pinState;
debounceState = DebounceStates::WAITING_CHANGE;
Serial.print("pinState:");
Serial.println(inputPinStableValue);
}
break;
}
default:
Serial.println("Error");
break;
}
}
void loop() {
task();
}
Explicación del código:
Verificación de los escenarios de prueba:
Enunciado de la evaluación¶
En un escape room se requiere construir una aplicación para controlar una bomba temporizada. La siguiente figura ilustra la interfaz de la bomba. El circuito de control de la bomba está compuesto por tres sensores digitales, en este caso pulsadores, denominados UP, DOWN, ARM (los simularemos con el PC), un display (LCD) y una salida digital para activar la bomba (simularemos la salida y el display con el PC).
El controlador funciona así:
- Inicia en modo de configuración, es decir, sin hacer cuenta regresiva aún, la bomba está
desarmada. El valor inicial del conteo regresivo es de 20 segundos. - En el modo de configuración, los pulsadores UP y DOWN permiten aumentar o disminuir el tiempo inicial de la bomba.
- El tiempo se puede programar entre 10 y 60 segundos con cambios de 1 segundo.
- El tiempo de configuración se debe visualizar en el LCD (enviamos el valor al PC).
- El pulsador ARM arma la bomba.
- Una vez armada la bomba, comienza la cuenta regresiva que será visualizada en el LCD en por medio de una cuenta regresiva en segundos.
- La bomba explotará (se activa la salida de activación de la bomba) cuando el tiempo llegue a cero. En este punto el control regresará al modo de configuración.
- Una vez la bomba esté armada es posible desactivarla ingresando un código de seguridad. El código será la siguiente secuencia de pulsadores presionados uno después de otro: DOWN, UP, DOWN, DOWN, UP, ARM.
- Si la secuencia se ingresa correctamente el controlador pasará de nuevo al modo de configuración de lo contrario continuará la fatal cuenta regresiva.
Requisitos¶
- R01: la solución debe tener dos tareas concurrentes. La Tarea 1 se debe encargar del control de la bomba. La Tarea 2 debe generar una señal digital periódica con una frecuencia de 1 Hz. La señal debe permanecer en alto 500 ms y en bajo 500 ms.
- R02: debes almacenar la clave de desarmado de la bomba en una arreglo.
- R03: debes definir una función a la cual le pasarás la dirección en memoria de dos arreglos: uno con la clave recibida y otro con la clave correcta. La función deberá devolver un bool así: true si la clave recibida es igual a la clave almacenada o false si las claves no coinciden.
- R04: realiza un diagrama con el modelo en máquina de estados para tu solución.
- R05: define varios escenarios de prueba que permitan recoger la funcionalidad descrita del controlador.
- R06: implementa el modelo de máquina de estados considerando todas las tareas solicitadas.
- R07: verifica todos los escenarios de prueba definidos.
Entregables¶
- Sube a este
enlace un archivo pdf nombrado con los nueve dígitos que componen tu ID. Por ejemplo: 000008716.pdf. El archivo
debe tener lo siguiente:
- Tu nombre completo.
- Evaluación de la unidad 1 y la fecha en la cual vas subir el archivo.
- Sección 1: imagen con el diagrama de estados.
- Sección 2: enlace a un video donde expliques el diagrama de estados.
- Sección 3: Definición de los escenarios de prueba (diagrama de secuencias)
- Sección 4: enlace a un video donde expliques los escenarios.
- Sección 5: enlace a GitHub a un repositorio PÚBLICO donde estará el código de la evaluación. NO OLVIDES que debes evidenciar el proceso de desarrollo mediante el historial de commits en el repositorio.
- Sección 6: enlace a un video donde expliques el código.
- Sección 7: enlace a un video donde muestres la verificación de cada escenario de prueba.
Criterios de evaluación¶
- Solución del problema: (2 unidades):
- Sección 1 (0.5).
- Sección 3 (0.5)
- Sección 5 (1).
- Explicación de la solución (3 unidades)
- Sección 2 (1).
- Sección 4 (0.5).
- Sección 6 (1).
- Sección 7 (0.5).